Skip to content
Continua a leggere →Continua a leggere →Continua a leggere →Continua a leggere →Continua a leggere →Continua a leggere →Continua a leggere →Continua a leggere →Continua a leggere →
Ultime Notizie
1-Alla-Scoperta-del-Mini-Robot-Car
1-Alla-Scoperta-del-Mini-Robot-Car
Obiettivo: Conoscere l'hardware del Mini Robot Car, comprendere l'alimentazione necessaria e imparare a installare (e gestire) le estensioni personalizzate nell'ambiente MakeCode.
Concetti Chiave:
- Riconoscimento dei componenti hardware esterni (motori, sensori di linea, infrarossi).
- Il concetto di "Estensione" (Libreria) in programmazione.
- Gestione avanzata dell'interfaccia MakeCode .
Fase 1. Esplorazione dell'Hardware 🔍
Iniziamo esplorando fisicamente il robot e capendo di cosa è capace.
-
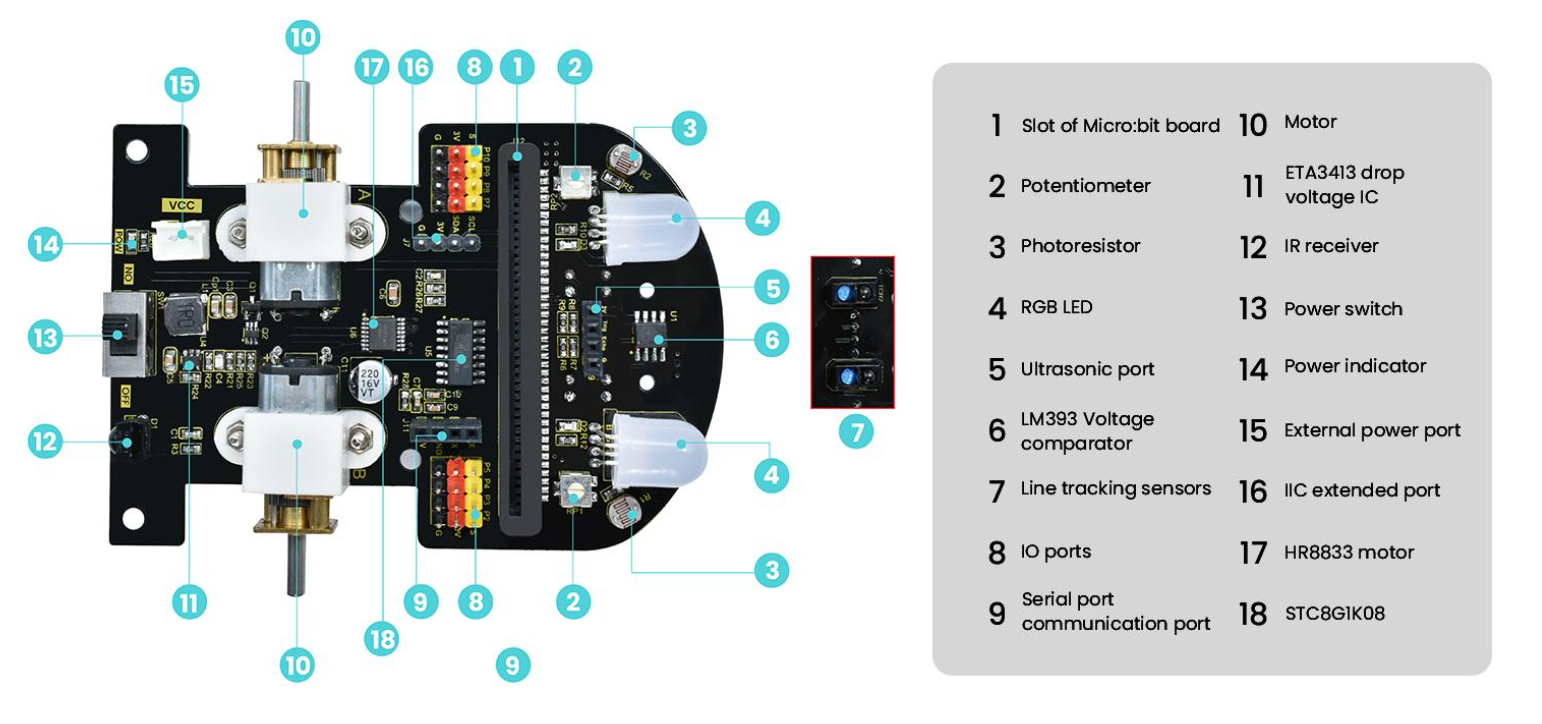
Il Cuore del Robot: Il Mini Robot Car è un'auto multifunzione basata sulla scheda BBC microbit. È equipaggiata con una ricca varietà di sensori e periferiche.
-
I Sensi del Robot:
- Due sensori fotosensibili (fotoresistenze).
- Due fari colorati (LED RGB).
- Sensori per il tracciamento della linea (Line tracking).
- Un ricevitore a infrarossi (IR) per il telecomando.
- Una porta dedicata al sensore a ultrasuoni.
-
Motori e Potenza: L'auto utilizza due motori , con una velocità di rotazione di 200RPM.
-
Energia: Questo passaggio è cruciale. Il robot è alimentato da tre batterie AAA. L'input della porta di alimentazione è di DC 4.5V , mentre i sensori operano a 3V.
Fase 2. Cos'è un'Estensione? 🧩
Per comandare tutti questi nuovi sensori, i blocchi standard di Microbit non bastano.
- Teoria: Le estensioni sono moduli di codice funzionali che vengono installati dall'esterno dell'editor MakeCode e aggiungono nuovi blocchi alla Casella degli strumenti (Toolbox). È una collezione di codice che estende le funzionalità del linguaggio di programmazione di base.
Fase 3. Aggiungere l'Estensione in MakeCode 💻
Adesso passiamo ai computer e prepariamo l'ambiente di lavoro.
| Passo | Istruzione per gli studenti | | :
2-Accendiamo i Fari RGB
2-Accendiamo i Fari RGB
Obiettivo: Imparare a controllare i due fari LED RGB del robot, comprendendo la differenza tra l'impostazione di un colore e la sua effettiva visualizzazione.
Concetti Chiave:
- Cos'è un LED RGB (Red, Green, Blue).
- Comunicazione: il microbit dice al controller del robot come accendere i LED.
- Utilizzo del blocco
LED Show.
Fase 1: Teoria dei Fari RGB 🌈
- Che cos'è RGB? I fari del robot non sono semplici lampadine, ma LED RGB. "RGB" sta per Rosso (Red), Verde (Green) e Blu (Blue). Mescolando questi tre colori base, il robot può creare quasi ogni colore.
- Come ragiona il Robot? Il microbit da solo non ha i pin sufficienti per tutto, quindi invia un messaggio "segreto" (tramite protocollo IIC) a un chip sul robot che si occupa di accendere fisicamente le luci. Noi, grazie all'estensione
MiniCar, useremo blocchi semplicissimi senza preoccuparci della complessità elettronica. - La Regola d'Oro dei LED: Impostare un colore non basta. Bisogna sempre dare il comando di "stampa" o "mostra" per far accendere la luce.
Fase 2: Il Primo Test (Accensione Base)🚦
Apriamo la categoria MiniCar nella Toolbox.
| Sezione | Blocco | Istruzione e Funzione | Dove Inserire | | :
3-Il Pipistrello Elettronico (Sensore a Ultrasuoni)
3-Il Pipistrello Elettronico (Sensore a Ultrasuoni)
Obiettivo: Comprendere il funzionamento dell'ecolocalizzazione, leggere i dati dal sensore a ultrasuoni e usare la logica condizionale per creare un "sensore di parcheggio" visivo.
Concetti Chiave:
- Funzionamento dei sensori a ultrasuoni (Ecolocalizzazione: trigger ed echo).
- Variabili (per memorizzare la distanza letta).
- Logica Condizionale (
if / else). - Integrazione con i fari RGB (visti nella lezione precedente).
Fase 1: Teoria - Come "vede" un Pipistrello? 🗣️
- L'Ecolocalizzazione: Come fanno i pipistrelli o i delfini a non sbattere al buio?". Il sensore montato sulla porta frontale (Ultrasonic port) funziona esattamente così: un "occhio" invia un suono acutissimo (invisibile all'orecchio umano, un ultrasuono), il suono sbatte contro un ostacolo e torna indietro all'altro "occhio".
- La Matematica del Suono: Il chip calcola quanto tempo ci ha messo il suono a fare andata e ritorno. Conoscendo la velocità del suono, calcola la distanza in centimetri. Tutto questo avviene in frazioni di secondo!
- La Variabile: Per usare questo dato, dobbiamo "inscatolarlo" in una Variabile che chiameremo
distanza.
Fase 2: Lettura dei Dati 📏
Iniziamo scrivendo un programma base per leggere il valore dal sensore e mostrarlo sullo schermo della microbit.
| Sezione | Blocco | Istruzione e Funzione | Dove Inserire | | :
4-Primi Passi e Curve (Controllo Motori)
4-Primi Passi e Curve (Controllo Motori) 🏎️
Obiettivo: Comprendere il sistema di trazione a due ruote (guida differenziale), imparare a controllare la velocità e la direzione dei motori e creare una sequenza di movimento (Avanti, Indietro, Destra, Sinistra). Imparare a far ruotare il robot agendo sulla velocità dei singoli motori.
Concetti Chiave:
- Trazione differenziale (come si curva con due sole ruote motrici).
- Controllo della velocità tramite PWM.
- Sequenze temporizzate (l'uso del blocco
pause).
Fase 1: Teoria - La Meccanica del Movimento ⚙️
-
I Due Motori: Il robot ha due motori indipendenti già integrati nella piastra di base. Non c'è uno sterzo come nelle automobili normali!
-
Come Curva? (Guida Differenziale):
- Per andare Avanti: entrambi i motori girano in avanti alla stessa velocità.
-
Per Curvare a Destra: il motore sinistro gira in avanti, mentre il motore destro si ferma (o gira all'indietro per una curva stretta).
-
Il Cervello dei Motori: La nostra microbit non dà direttamente la corrente ai motori. Invia istruzioni a un chip che a sua volta usa segnali PWM per dire a un altro componente di far girare i motori. La velocità massima dei motori è di 200RPM (giri al minuto).
-
Energia Critica: Imotori consumano molta energia. Il robot deve essere alimentato dalle tre batterie AAA (che forniscono 4.5V in totale ) inserite nell'apposito alloggiamento. Senza batterie accese, il robot non si muoverà!
Fase 2: Avanti e Indietro (Il Test di Base) 🛣️
Facciamo avanzare il robot per 2 secondi, poi lo facciamo indietreggiare per 2 secondi e infine lo fermiamo.
| Sezione | Blocco | Istruzione e Funzione | Dove Inserire | | :
5-Il Robot Esploratore (Evita-Ostacoli) 🤖
5-Il Robot Esploratore (Evita-Ostacoli) 🤖
Obiettivo: Integrare input (sensore) e output (motori) in un ciclo continuo per permettere al robot di navigare in autonomia in una stanza senza sbattere.
Concetti Chiave:
- Autonomia robotica (Senso Decisione Azione).
- Logica Condizionale avanzata in un ciclo continuo (
forever). - Calibrazione dei tempi di manovra.
Fase 1: Teoria - Come ragiona un veicolo autonomo? 🧠
-
Il Ciclo di Guida Autonoma: "Come fa un'auto a guida autonoma a non fare incidenti?". Il principio base è sempre lo stesso:
- Sente (legge l'ambiente con i sensori).
- Pensa (elabora i dati con il codice).
- Agisce (muove i motori o frena).
-
Il nostro Algoritmo: Il nostro robot dovrà fare esattamente questo in una frazione di secondo, ripetutamente:
- Sente: Legge la distanza di fronte a sé.
- Pensa: L'ostacolo è a meno di 15 cm?
- Agisce: Se SÌ Frena, fai retromarcia, girati. Se NO Continua dritto.
-
Sicurezza in Aula: Poiché i robot si muoveranno da soli, è fondamentale creare uno spazio "recintato" sul pavimento o assicurarsi che non cadano dai tavoli!
Fase 2: Costruzione del "Cervello" 🧩
Iniziamo a programmare. Questa volta useremo il ciclo forever perché il robot non deve mai smettere di guardarsi intorno.
| Sezione | Blocco | Istruzione e Funzione | | :
6-Il Robot Girasole (Fotoresistenze e Segui-Luce) 🌻🔦
6-Il Robot Girasole (Fotoresistenze e Segui-Luce) 🌻🔦
Obiettivo: Scoprire come funzionano i sensori di luce (fotoresistenze), leggere i loro valori e programmare il robot per inseguire una fonte luminosa, come una falena o un girasole.
Concetti Chiave:
- Cos'è una fotoresistenza (sensore analogico).
- Confronto tra due variabili (
Luce DestravsLuce Sinistra). - Controllo differenziale dei motori in base agli input analogici.
Fase 1: Teoria - Gli "Occhi" per la Luce 👁️
- La Fotoresistenza: i due piccoli componenti sulla parte frontale della scheda del robot (vicino ai fari RGB) si chiamano fotoresistenze; sono resistenze speciali che fanno passare più o meno corrente a seconda di quanta luce le colpisce.
- Valori Analogici: A differenza di un pulsante (acceso/spento), le fotoresistenze restituiscono un numero (da 0 a 255 nel nostro caso). Zero significa buio totale, numeri alti indicano molta luce.
- Come fa a seguire la luce? Se punto una torcia a destra del robot, il sensore destro leggerà un valore più alto di quello sinistro. Il "cervello" (il nostro codice) capirà che deve far girare il robot verso destra.
Fase 2: Il Test del Buio (Lettura dei Sensori) 📊
Prima di muoverci, dobbiamo capire che numeri inviano i due sensori.
| Sezione | Blocco | Istruzione e Funzione | | :
7-Il Robot Esploratore 2 (Evita-Ostacoli) 🤖
7-Il Robot Esploratore 2 (Evita-Ostacoli) 🤖
Obiettivo: Progettare, codificare e calibrare un veicolo a guida autonoma. Comprendere il paradigma Sense-Think-Act (Senti-Pensa-Agisci) e il concetto di "Tuning" (calibrazione) dei parametri fisici.
Fase 1: Brainstorming e Teoria 🧠
-
Domanda alla classe: "Pensate ai robot aspirapolvere (come il Roomba) o alle auto a guida autonoma. Come fanno a decidere quando girare senza l'intervento umano?"
-
Il Paradigma S-T-A: fondamentale della robotica:
- Sense (Senti): Il robot acquisisce dati dal mondo fisico. Nel nostro caso, usa la porta a ultrasuoni.
- Think (Pensa): Il micro:bit elabora i dati. Qui entra in gioco la Logica Condizionale (
if / else). - Act (Agisci): Il robot esegue un'azione meccanica.
-
Nozioni Hardware Avanzate (per i più curiosi): I motori possono raggiungere una velocità di 200 RPM (giri al minuto). Se andiamo alla massima velocità, l'auto percorrerà troppo spazio prima che il sensore riesca a fare una seconda lettura, causando uno schianto!
Fase 2: Progettazione dello Pseudocodice 📝
Scrivere su un foglio (o alla lavagna) le "regole" del robot in italiano semplice.
- Esercizio Guidato:
- Cosa facciamo sempre? -> Misuriamo la distanza.
- Qual è la nostra distanza di sicurezza? -> Decidiamo insieme una soglia, ad esempio 15 cm.
- Regola 1: SE la distanza è minore di 15 cm, ALLORA frena, fai retromarcia, girati.
- Regola 2: ALTRIMENTI (la strada è libera), ALLORA vai dritto.
Fase 3: Scrittura del Codice 💻
Tradurre lo pseudocodice nei blocchi dell'estensione MiniCar.
| Sezione | Blocco | Istruzione e Funzione Pedagogica | | :
8-La Pista Cifrata (Robot Segui-Linea) 🏁
8-La Pista Cifrata (Robot Segui-Linea) 🏁
Obiettivo: Comprendere il principio della riflessione della luce, leggere i valori digitali dei sensori di tracciamento e programmare un algoritmo di correzione della traiettoria per seguire un percorso nero su fondo bianco.
Fase 1: Brainstorming e Teoria 🧠
- Domanda alla classe: "Come fanno i treni a seguire i binari senza uno sterzo? E se il nostro robot dovesse seguire una linea disegnata a terra senza avere dei binari fisici?"
- Il Segreto è sotto il cofano: Chiedi ai ragazzi di capovolgere l'auto (spenta). Sotto troveranno i "Line tracking sensors". Spiega che funzionano emettendo luce infrarossa e leggendo il riflesso:
- Il colore BIANCO riflette la luce. Il sensore legge "0" (Falso/Strada libera).
- Il colore NERO assorbe la luce. Il sensore non riceve il riflesso e legge "1" (Vero/Linea trovata).
- L'Hardware: Il robot usa un componente chiamato "Voltage comparator" per trasformare questi riflessi in segnali digitali perfetti (0 o 1) per la nostra microbit.
Fase 2: Progettazione dello Pseudocodice 📝
- Cosa facciamo se entrambi i sensori leggono BIANCO (0)? -> La linea è in mezzo, andiamo DRITTI!
- Cosa facciamo se il sensore SINISTRO legge NERO (1)? -> Stiamo uscendo fuori strada a destra! Dobbiamo curvare a SINISTRA per rimettere la linea al centro.
- Cosa facciamo se il sensore DESTRO legge NERO (1)? -> Curviamo a DESTRA.
- E se entrambi leggono NERO (1)? -> Siamo arrivati a un incrocio o alla fine della pista. STOP.
Fase 3: Scrittura del Codice 💻
| Sezione | Blocco | Istruzione e Funzione Pedagogica | | :
10-Laboratorio-microbit-parte-10
Messaggistica con Due Microbit (Radio)
Questo è il passo più grande e utile: la comunicazione tra due o più Micro:bit. Ti permette di creare giochi multiplayer, telecomandi, o, in questo caso, un semplice sistema di messaggistica.
Concetti: comunicazione Radio; inviare e ricevere dati senza fili.
Struttura del Programma (Da caricare su DUE Micro:bit)
Micro:bit 1 (Trasmettitore A)
|Blocco/Azione| Dettagli Tecnici| |: